mapp Services V5.16
•显示高级参数
名称 |
||||||||||
序列 |
||||||||||
命令 |
||||||||||
命令。{/Name} |
||||||||||
名称 |
||||||||||
文本 |
||||||||||
层次结构 |
||||||||||
类型 |
||||||||||
轴 |
||||||||||
命令结构 |
||||||||||
参数结构 |
||||||||||
执行器 |
||||||||||
最终状态 |
||||||||||
参数1-N |
||||||||||
条件1-N |
||||||||||
条件轴 |
||||||||||
预期状态 |
||||||||||
反应 |
||||||||||
条件ID |
||||||||||
条件过程变量 |
||||||||||
预期状态 |
||||||||||
反应 |
||||||||||
条件ID |
||||||||||
过程变量 |
||||||||||
等待时间类型 |
||||||||||
过程变量 |
||||||||||
过程变量 |
||||||||||
等待条件 |
||||||||||
名称 |
||||||||||
条件过程变量 |
||||||||||
条件类型 |
||||||||||
循环计数类型 |
||||||||||
过程变量 |
||||||||||
一个命令描述了一个可以由序列器执行的动作。与参数一起,命令成为一个步骤。多个步骤构成了一个序列。
可能的命令。
•开始注射(注射成型)
•延长料筒
•等待一个特定的值(PV值)。
•设置报警
每条命令必须有一个唯一的名称。还可以为每个命令定义一个单独的描述文本。该文本可以被指定为静态的或 使用文本系统进行本地化。
如果使用部件 "序列器 "编辑一个序列,那么每个命令都有一个描述文本。
命令的层次结构被用来在人机界面应用程序中直观地显示和分组命令。 小部件 "Sequencer " 被用于这种视觉显示。由于有非常广泛的不同命令,它们可以被分组。换句话说,单个命令被分配到一个组。然后在编辑序列时,该组会首先显示在HMI应用程序中。一旦选中,就可以选择分配给该组的一个命令。这导致了几个不同的层次结构。关于命令如何直观地显示的更多信息,请看 这里。
如果配置的扩展属性被启用,"在小组件上显示命令 "可以用来确定这里定义的命令是否应该显示在 小组件 "序列器 "上 。默认情况下,"在部件上显示命令= TRUE",即该命令显示在 部件 "Sequencer "上。
有几种类型的命令:
运动
命令 "移动 "可用于执行任何机器功能。在这种情况下,一个轴以及命令和参数结构被分配给该命令。
为了执行 "移动 "命令, 在 "命令结构 "下指定一个类型 为MpSequencerCommandType的PV 。这个命令结构被用作定序器和任务之间的接口。
此外,还可以为 "运动 "命令指定参数。为此,需要一个包含 "参数 "下指定的所有数值的PV。例如,如果在 "参数1 "下指定了 "眨眼时间",那么参数结构中必须包括一个名为 "眨眼时间 "的值。这个PV在 "参数结构 "下指定。
"最终状态 "告知运动结束时轴状态的值的顺序。
轴的状态必须始终由应用程序来设置!
"运动 "命令的执行也可以受到条件的限制(静态联锁)。在这种情况下,一个轴的状态或一个PV与一个预期值进行比较。如果这个条件被满足,"反应 "中指定的反应就会被执行。该条件可以通过 "条件ID "给出一个ID。当 "联锁设备激活 "报警 被触发时,该ID可以作为附加信息被添加 。这样,用户就知道是哪个条件触发了报警。
可能的反应。
•等待: 该命令在执行前等待条件满足。
•停止: 序列以错误结束。
这些联锁可以用来防止机器的不良动作,如果这些动作会危及机器,或者从过程序列中不可能做到。它使创建任何数量的保护功能成为可能,这些保护功能在命令开始前和执行过程中被检查。例如,一个静态联锁可以阻止一个轴的移动,如果它由于位置原因会与另一个轴发生碰撞。
此外,一个 执行器 可以被分配给 "运动 "命令。
该命令的优先级可以在高级参数下设置。如果 已经分配了 一个 执行器 ,那么总是执行优先级较高的命令。如果一个并行的命令有相同的 执行器,那么根据设置,将使用 "后备执行器"。
与任务的接口
通往任务的接口是由 "命令结构 "和 "参数结构 "定义的。命令结构的结构必须如下。
元素 |
数据类型 |
来源 |
描述 |
开始 |
BOOL |
序列器 |
当步骤应该开始时,定序器将此PV设置为 TRUE 。当序列器结束或停止该步骤时,它被重置。 |
停止 |
BOOL |
序列器 |
每当要求停止时,定序器就会设置这个PV。 |
执行器 |
STRING |
序列器 |
这个元素包含了关于当前运动使用哪个执行器的信息。序列器考虑到了优先级和后备执行器。 |
当前模式 |
序列器 |
可选的。这个元素(如果存在的话)包含关于当前选择的模式的信息。 |
|
运动状态 |
任务 |
该元素用于向定序器提供关于轴的状态的信息。序列器监视这个元素并对某些值作出反应。 •IDLE:序列正在等待。 •ACTIVE:命令 "Start "被评估,一个运动被激活。超时检查是有效的。 •DONE(完成)。运动已经完成。序列器可以继续执行该序列。 |
参数结构可以根据需要来安排。但是,它必须包含在 "参数 "下指定的所有值。
结构中的参数值在序列文件中用<Parameter Name="MyParameterName" Value="xxx"/>指定 。然后必须在任务中对这些值进行评估。一个参数可以用来定义轴的目标位置。因此,每次使用该命令可以在序列文件中指定一个新的目标位置。
设置PV
"Set PV "允许为一个过程变量分配一个特定的值。必须指定PV的名称。
必须在序列文件中用<PvValue Value="xxx"/>指定PV的新值 。
关于指定比较值的信息,请参阅 序列文件的结构。
等待时间
命令 "等待时间 "可以用来将下一步的执行延迟一定的时间。
如果该命令是用部件 "序列器 "配置的,该参数会自动显示在参数列表中。
一个数据类型为REAL的PV也可以被定义为源。时间的单位是秒。
如果命令是在序列中从外部输入的,那么命令中必须有一个类型为 "持续时间 "的节点。
<Duration Value="100"/>
等待过程变量
命令 "等待PV "可以用来等待,直到某个PV满足某个条件后再执行下一步。
必须为该命令指定一个PV。然后将该PV与基于所选条件的一个值进行比较。比较值必须在序列文件中用<PvValue Value="xxx"/>指定 。只有当条件得到满足时,序列才会继续进行下一步。
有关指定比较值的信息,请参阅 序列文件的结构。
设置报警
该命令触发一个警报。要触发的警报的名称在 "警报 "中指定。
该警报必须已经在 MpAlarmX中定义 过了。
条件性执行
"条件执行 "可以用来根据一个条件执行或跳过一个序列中的某些步骤。
为此要指定一个PV和条件。PV与基于条件的一个值进行比较。如果条件得到满足,则按照条件执行的步骤执行。否则,条件结束时的序列被执行。结束是由 "结束条件执行 "类型的命令定义的。
每个 "条件执行 "都需要一个 "结束条件执行"。
Execution with condition met |
Execution with condition unmet |
|
|
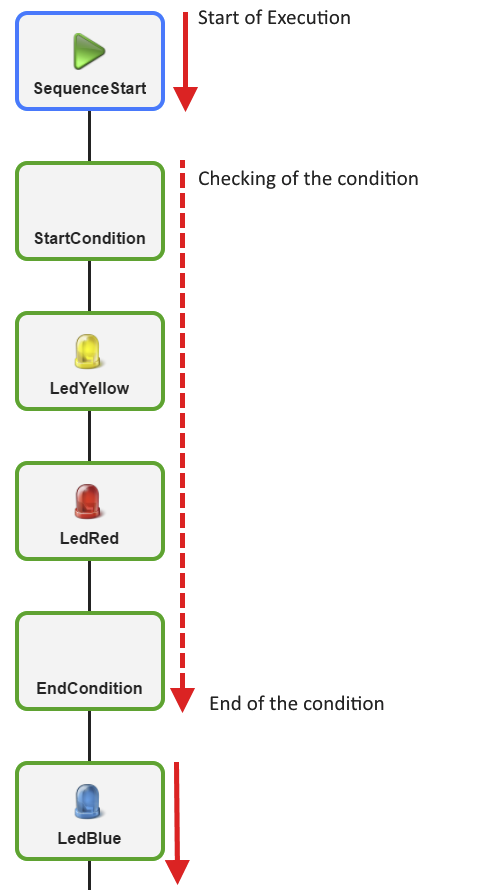
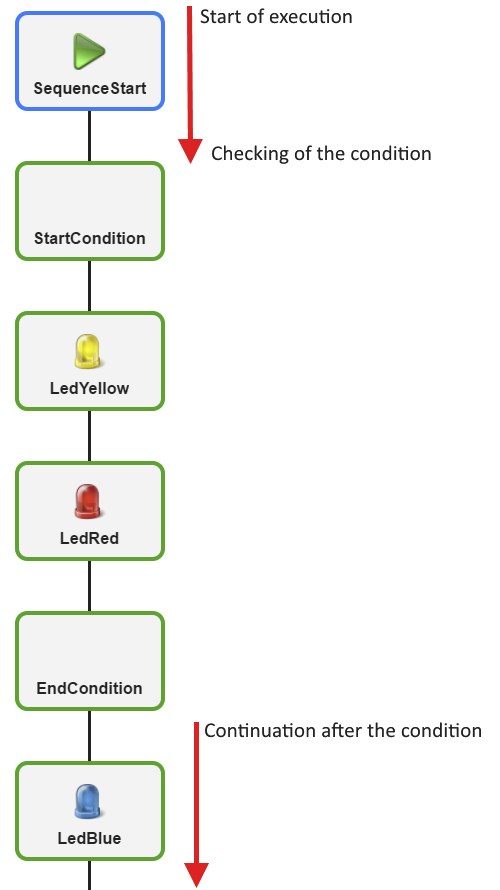
如果条件得到满足,那么两个步骤("LedYellow "和 "LedRed")都被执行。如果 "StartCondition "的条件没有满足,那么直到下一个 "End conditional execution "的步骤都不会被执行(本例中是 "LedYellow "和 "LedRed")。序列的执行在 "结束条件执行 "后继续进行。
结束条件执行
"结束条件执行 "定义了一个 "条件执行 "的结束。这个命令没有参数,因为下一个相关的 "结束条件执行 "被用作 "条件执行 "的结束。
循环执行/结束循环
这些命令可以用来生成一个循环。循环执行 "和 "结束循环 "之间的步骤被执行n次。这些步骤的执行频率在序列文件("序列文件中的循环次数")或通过过程变量("PV中的循环次数")定义。过程变量的数据类型必须是UDINT。 更多信息请参见 序列文件的结构 。
无
该命令可用于在序列中定义一个不应执行任何操作的步骤。例如,这可用于步骤 "SequenceStart "和 "SequenceEnd"。