mapp Services V5.16
This function can be used to create a component hierarchy. This can be used, for example, to subdivide a production facility into different groups. See Creating modular applications.
The MpLink of the component that should be ordered in the higher hierarchy group is specified on input "MpLink". This group is defined via input "ParentLink". For example, this can be a machine group or even a normal component (e.g. MpAxis connected to the MpRoboArm6Axis component). The return value is then used as ParentLink for the lower-level component.
Example: 6-axis robot
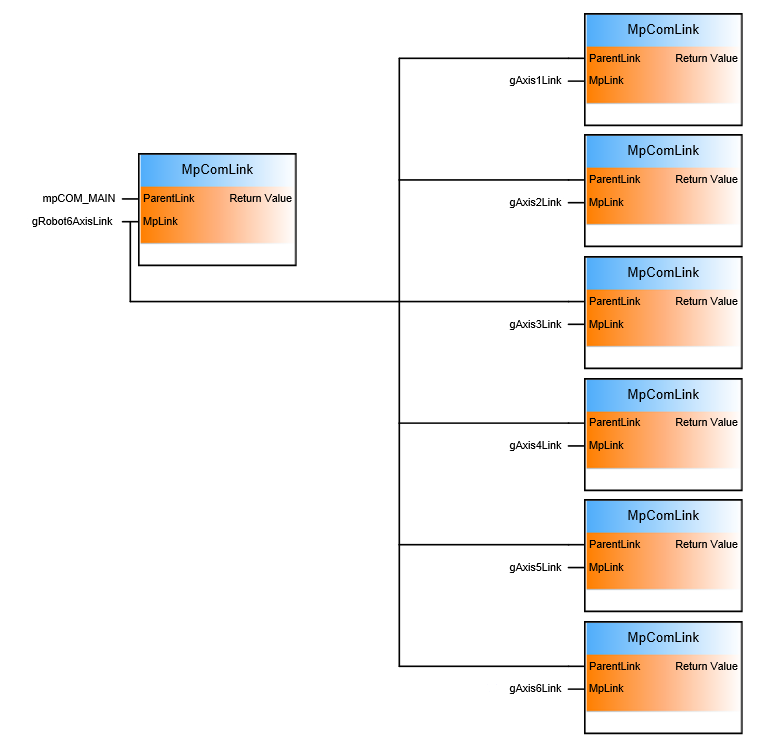
On the first MpComLink function, constant mpCOM_MAIN is specified for input "ParentLink". This constant is used to register a component in the MpCom. In this example, the robot component is registered in the MpCom. The individual axes are subordinate to the robot component in the hierarchy and must therefore be connected to it. This can be done again with the MpComLink function.
The hierarchy must be created during the initialization subroutine; all components that are also integrated must be disabled ("Enable" = FALSE). The hierarchy can then no longer be changed during runtime. When the controller is restarted, the hierarchy is rebuilt.